ICRA 2025 · CCF B · Core A*
DRIVE: Dependable Robust Interpretable Visionary Ensemble Framework in Autonomous Driving
中文项目页
TL;DR
DRIVE 通过约束解释和输出的一致性与稳定性,提升基于概念的自动驾驶系统可靠性,并提供专门指标与充分实证验证。
作者: Songning Lai~, Tianlang Xue~, Hongru Xiao, Lijie Hu, Jiemin Wu, Ninghui Feng, Runwei Guan, Haicheng Liao, Zhenning Li, Yutao Yue†
单位: HKUST(GZ), Tongji University, KAUST, University of Macau
Teaser

DRIVE is all you need!
摘要
自动驾驶近期逐渐转向端到端学习范式,即从传感器输入直接映射到驾驶动作,以增强车辆鲁棒性和适应性。然而,这些模型通常牺牲可解释性,给信任、安全与合规带来挑战。为解决这些问题,我们提出 DRIVE:Dependable Robust Interpretable Visionary Ensemble Framework in Autonomous Driving,用于提升端到端无监督自动驾驶模型解释的可靠性和稳定性。
我们的工作针对 Driving through the Concept Gridlock (DCG) 模型中的固有不稳定问题,这些问题会削弱解释和决策过程的可信度。我们定义 DRIVE 的四个关键属性:consistent interpretability、stable interpretability、consistent output 与 stable output。这些属性共同保证解释在不同场景和扰动下仍保持可靠与鲁棒。通过大量实证评估,我们证明该框架能够增强解释的稳定性和可靠性。贡献包括:对 DCG 可靠性问题的深入分析、DRIVE 及其基本性质的严格定义、实现 DRIVE 的框架,以及用于评估概念式可解释自动驾驶模型可靠性的新指标。
动机
- 增强公众信任:可解释且稳定的解释帮助用户和监管机构信任自动驾驶系统。
- 处理黑盒问题:端到端模型往往缺乏透明度;DRIVE 让决策过程更透明且更鲁棒。
- 满足监管需求:安全与可解释标准越来越需要可靠且可审计的 AI。
贡献
- 深入分析 DCG 可靠性:识别并刻画概念式解释中的不稳定问题。
- 严格定义 DRIVE 及其性质:提出一致/稳定解释与输出四个关键属性及对应指标。
- 可靠性优化框架:给出实现一致、稳定解释与输出的训练策略。
- 新的评估指标:用于评估概念式可解释自动驾驶模型的可靠性。
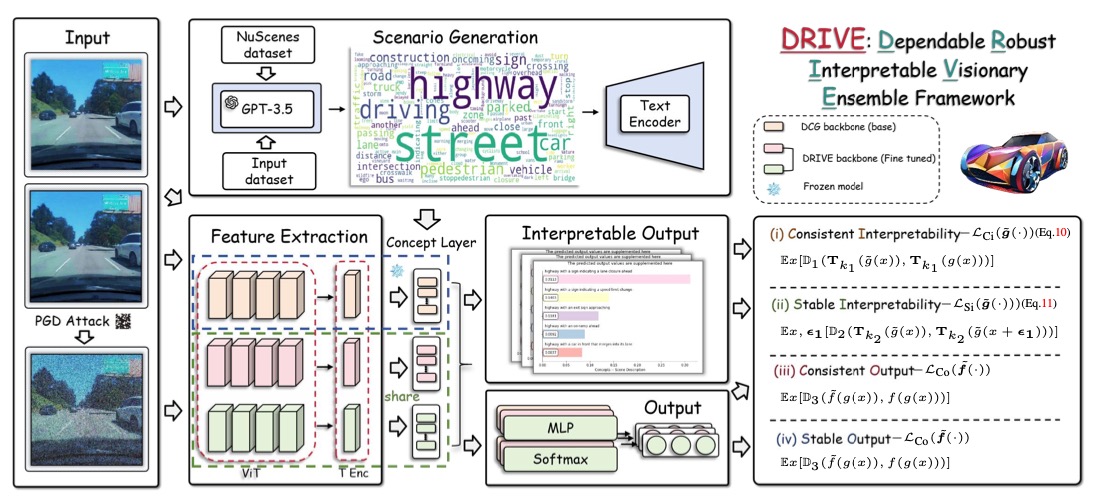
框架

DRIVE 模型框架。
演示

代码、数据与仓库
| 资源 | 链接 |
|---|---|
| 代码(GitHub) | github.com/xll0328/ICRA25-DRIVE |
| 论文 PDF | arXiv:2409.10330 |
| 数据集 | Comma2k19 |
安装、数据预处理、训练(DCG → DRIVE)和脚本示例见 仓库 README。
引用
@inproceedings{lai2025drive,
title={DRIVE: Dependable Robust Interpretable Visionary Ensemble Framework in Autonomous Driving},
author={Songning Lai and Tianlang Xue and Hongru Xiao and Lijie Hu and Jiemin Wu and Ninghui Feng and Runwei Guan and Haicheng Liao and Zhenning Li and Yutao Yue},
booktitle={Proceedings of the IEEE International Conference on Robotics and Automation (ICRA)},
year={2025},
eprint={2409.10330},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2409.10330},
}